
티스토리 뷰
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using Priority_Queue;
[System.Serializable]
public class Node
{
public bool isWall;
public Node parentNode;
public int x, y;
public int g, h;
public int f { get { return h + g; } }
public Node(bool _isWall, int _x, int _y)
{
isWall = _isWall;
x = _x;
y = _y;
}
}
public class GameManager : MonoBehaviour
{
public GameObject startPos_ob, EndPos_ob, bottomLeft_ob, topRight_ob;
[SerializeField]
Vector2Int bottomLeft, topRight, startPos, endPos;
public bool allowDiagonal = true;
public bool dontCrossCorner = true;
int sizeX, sizeY;
public Node[,] nodeArray = new Node[0, 0];
Node startNode, endNode, curNode;
[SerializeField]
List<Node> finalList;
SimplePriorityQueue<Node> openList;
HashSet<Node> closedList;
void OnValidate()
{
SetPosition();
}
void SetPosition()
{
startPos = Vector2Int.FloorToInt(startPos_ob.transform.position);
bottomLeft = Vector2Int.FloorToInt(bottomLeft_ob.transform.position);
topRight = Vector2Int.FloorToInt(topRight_ob.transform.position);
endPos = Vector2Int.FloorToInt(EndPos_ob.transform.position);
}
public void PathFinding()
{
SetPosition();
sizeX = topRight.x - bottomLeft.x + 1;
sizeY = topRight.y - bottomLeft.y + 1;
nodeArray = new Node[sizeX, sizeY];
for (int c = 0; c < sizeX; c++)
{
for (int r = 0; r < sizeY; r++)
{
RaycastHit2D hit = Physics2D.Raycast(new Vector3(c + bottomLeft.x, r + bottomLeft.y, 0), Vector3.zero, Mathf.Infinity, 1 << LayerMask.NameToLayer("Wall"));
nodeArray[c, r] = new Node(hit.collider != null, c + bottomLeft.x, r + bottomLeft.y);
}
}
startNode = nodeArray[startPos.x - bottomLeft.x, startPos.y - bottomLeft.y];
endNode = nodeArray[endPos.x - bottomLeft.x, endPos.y - bottomLeft.y];
openList = new SimplePriorityQueue<Node>();
closedList = new HashSet<Node>();
finalList = new List<Node>();
openList.Enqueue(startNode, startNode.f);
while (openList.Count > 0)
{
curNode = openList.Dequeue();
closedList.Add(curNode);
if (curNode == endNode)
{
BuildFinalPath();
StartCoroutine(AiMove_co());
return;
}
EvaluateNeighbours(curNode);
}
}
void BuildFinalPath()
{
Node target = endNode;
while (target != startNode)
{
finalList.Add(target);
target = target.parentNode;
}
finalList.Add(startNode);
finalList.Reverse();
}
void EvaluateNeighbours(Node currentNode)
{
int[] dx = { 1, -1, 0, 0, 1, -1, 1, -1 };
int[] dy = { 0, 0, 1, -1, 1, 1, -1, -1 };
for (int i = 0; i < (allowDiagonal ? 8 : 4); i++)
{
int newX = currentNode.x + dx[i];
int newY = currentNode.y + dy[i];
OpenList_Add(newX, newY, currentNode);
}
}
void OpenList_Add(int x, int y, Node currentNode)
{
if (IsValidNode(x, y))
{
Node neighbourNode = nodeArray[x - bottomLeft.x, y - bottomLeft.y];
int moveCost = currentNode.g + ((currentNode.x == x || currentNode.y == y) ? 10 : 14);
if (moveCost < neighbourNode.g || !openList.Contains(neighbourNode))
{
neighbourNode.g = moveCost;
neighbourNode.h = (Mathf.Abs(neighbourNode.x - endNode.x) + Mathf.Abs(neighbourNode.y - endNode.y)) * 10;
neighbourNode.parentNode = currentNode;
if (!openList.Contains(neighbourNode))
{
openList.Enqueue(neighbourNode, neighbourNode.f);
}
}
}
}
bool IsValidNode(int x, int y)
{
if (x < bottomLeft.x || x > topRight.x || y < bottomLeft.y || y > topRight.y)
return false;
Node node = nodeArray[x - bottomLeft.x, y - bottomLeft.y];
if (node.isWall || closedList.Contains(node))
return false;
if (allowDiagonal && dontCrossCorner)
{
if (nodeArray[curNode.x - bottomLeft.x, y - bottomLeft.y].isWall &&
nodeArray[x - bottomLeft.x, curNode.y - bottomLeft.y].isWall)
{
return false;
}
}
else if (dontCrossCorner)
{
if (nodeArray[curNode.x - bottomLeft.x, y - bottomLeft.y].isWall ||
nodeArray[x - bottomLeft.x, curNode.y - bottomLeft.y].isWall)
{
return false;
}
}
return true;
}
private void OnDrawGizmos()
{
if (finalList != null)
{
Gizmos.color = Color.red;
for (int i = 0; i < finalList.Count - 1; i++)
{
Gizmos.DrawLine(new Vector2(finalList[i].x, finalList[i].y), new Vector2(finalList[i + 1].x, finalList[i + 1].y));
}
}
}
[SerializeField]
float speed = 1;
IEnumerator AiMove_co()
{
Transform player = GameObject.Find("Player").transform;
foreach (var node in finalList)
{
player.position = new Vector3(node.x, node.y, 0);
yield return new WaitForSecondsRealtime(speed);
}
}
}
1. Priority_Queue 라이브러리 설치
Priority_Queue는 C#의 우선순위 큐 라이브러리입니다. 이를 Unity 프로젝트에 추가하려면 다음 단계를 따르세요:
NuGet Package: 가장 간단한 방법은 NuGet 패키지를 사용하는 것입니다. 하지만 Unity는 기본적으로 NuGet을 지원하지 않으므로, 다른 방법을 사용해야 합니다.
수동 설치: GitHub에서 소스 코드를 직접 다운로드하여 Unity 프로젝트에 추가할 수 있습니다.
수동 설치 방법
Priority_Queue GitHub 저장소에 접속합니다.
Priority Queue 소스 코드를 다운로드합니다.
다운로드한 파일에서 Priority_Queue 폴더를 찾아 복사합니다.
Unity 프로젝트의 Assets 폴더 안에 Plugins 폴더를 생성하고, 그 안에 Priority_Queue 폴더를 붙여 넣습니다.

가장 기본적인 길찾기를 위해
유니티의 타일맵을 사용하여 맵을 만든다.

벽이 없는 타일맵을 만들어둔다.
왼쪽 아래의 좌표가 0, 0 이 될 것이다.
오른쪽 위의 좌표가 타일 맵의 끝이며 노드 이차원 배열의 크기 (+1) 가 될 것이다.
중요한 것은 벽이 될 타일 맵의 설정이다.

이 위에 지나갈 수 없는 타일맵을 겹쳐둔다.
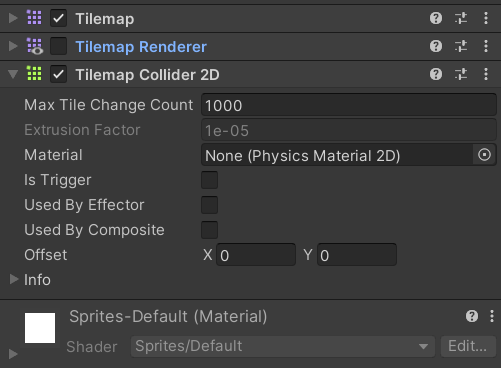
여기에 Tilemap Collider 2D 컴포넌트를 추가하면

Collider가 추가되어 Raycast2D 로 검출할 수 있게 된다.

추가적으로 태그나 레이어 설정을 하면 벽 타일을 검출하는 데 도움이 될 것이다.
코드 해부
// 나중에...
1. 데이터 구조 개선
효율적인 데이터 구조를 사용하기 위해 openList의 경우, 최소 힙(Min-Heap) 또는 우선순위 큐를 사용하여 성능을 크게 향상시킬 수 있습니다.
2. 코드 중복 제거
OpenList_Add 함수 내부에서 여러 번 사용되는 연산과 조건문을 함수로 분리하여 중복 코드를 제거할 수 있습니다.
3. 함수 분리 및 구조 개선
큰 함수들을 작게 나누어 코드의 가독성을 높이고, 유지보수가 용이하도록 합니다.
참고자료
2D 타일맵을 위한 A* 길찾기 알고리즘 (youtube.com)
그 밖의 길찾기 알고리즘
DFS (깊이 우선 탐색 알고리즘)
BFS (범위 우선 탐색 알고리즘)
JPS (점프 포인트 탐색 알고리즘)
Dijkstra (최단 경로 탐색 알고리즘)
...
'게임 개발 > 게임 개발 프로젝트' 카테고리의 다른 글
| [팀 프로젝트] 'The Last Hunt' 개발 후기 - 01 (0) | 2024.08.20 |
|---|---|
| 유니티 2D 게임 프로젝트 (feat. 날려날려) (7) | 2024.06.24 |
| C# 콘솔로 포켓몬스터 게임 만들기 (완결) (0) | 2024.06.06 |
| C# 콘솔로 7포커... (feat. 버블정렬, ) (0) | 2024.05.20 |
| #003 뱀 게임 (0) | 2024.05.01 |